TFWR. Навигация.
Для управления дроном есть функции get_pos_x(), get_pos_y() и move(). move() принимает команды East (x + 1), North (y + 1), West (x - 1) и South (y - 1). get_world_size() тоже полезна: мир квадратный, поэтому одного числа (длины стороны) достаточно.
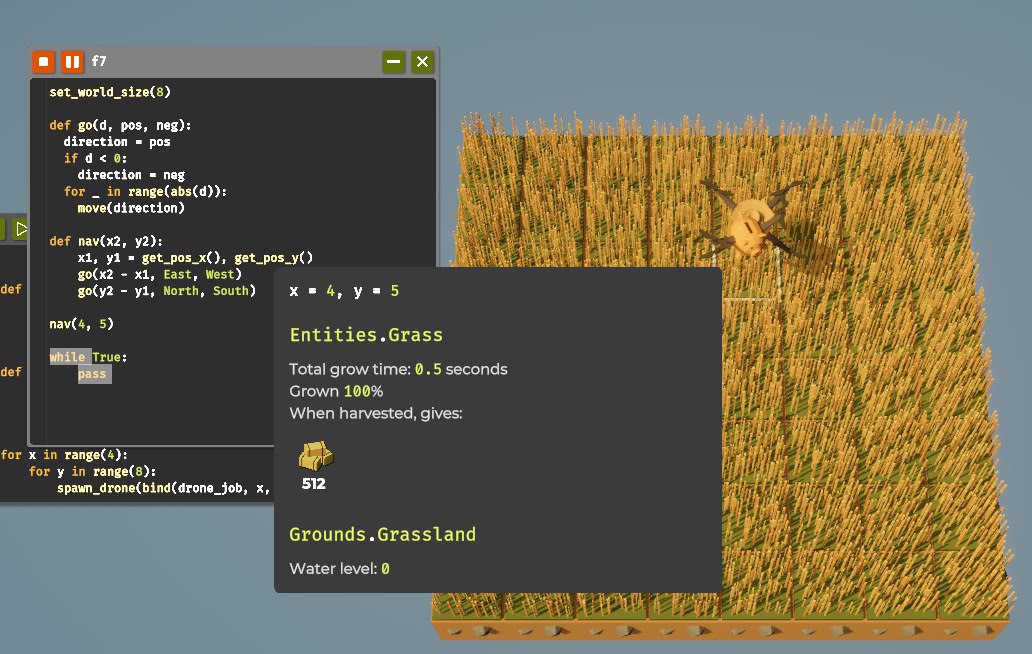
nav(x, y) — удобная вспомогательная функция. Она перемещает дрон в точку (x, y).
На скриншоте наивная навигация: выбираем положительное или отрицательное направление и идем туда. Почему наивная? Потому что она не учитывает тороидальность мира (переход через границы).