TFWR. Navigation.
In order to navigate the drone, there are get_pos_x(), get_pos_y(), and move() functions. move() takes East (x + 1), North (y + 1), West (x − 1), and South (y − 1) commands. get_world_size() is useful too. The world is square, so a single number (the side length) gives you everything you need.
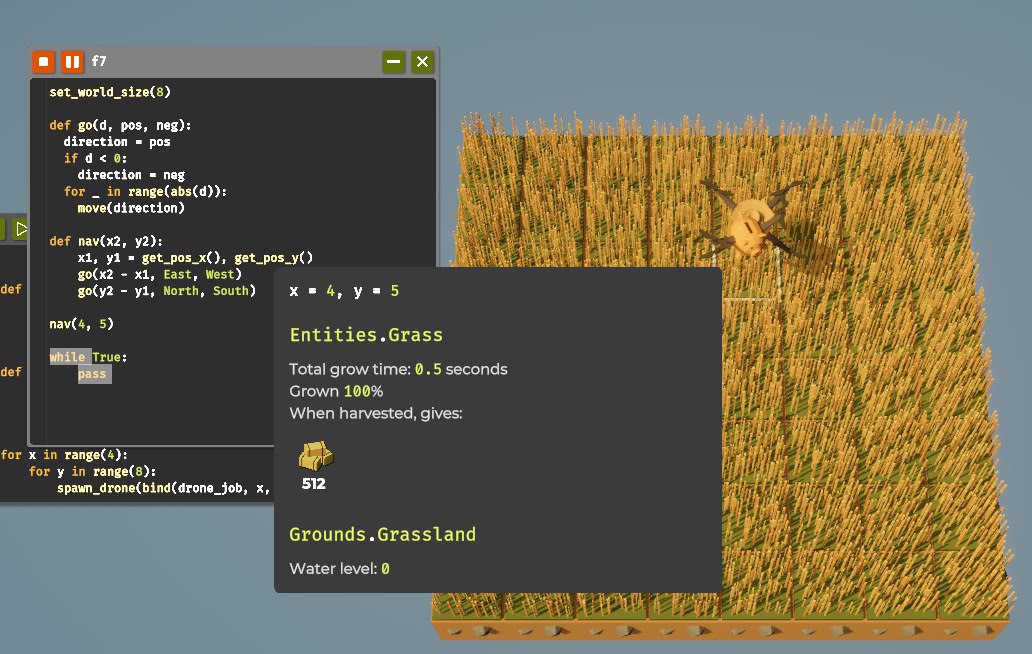
nav(x, y) is a nice-to-have function. It moves the drone to position (x, y).
In the screenshot, a naive navigation function decides where to go—positive or negative direction—and moves accordingly. Why naive? Because it doesn't take into account the toroidal nature of the world (wrap-around at the boundaries).